Redundant CAN-Based Robot Controller
High-speed STM32-based joystick and button controller with CAN FD, built for intense, high-stakes matches.
Project Details
Controlling a robot is harder than people think. It needs to be fast, it needs to be accurate, it needs to be redundant and reliable. And in high-speed, high-intensity matches, having all of those things is really, really important.
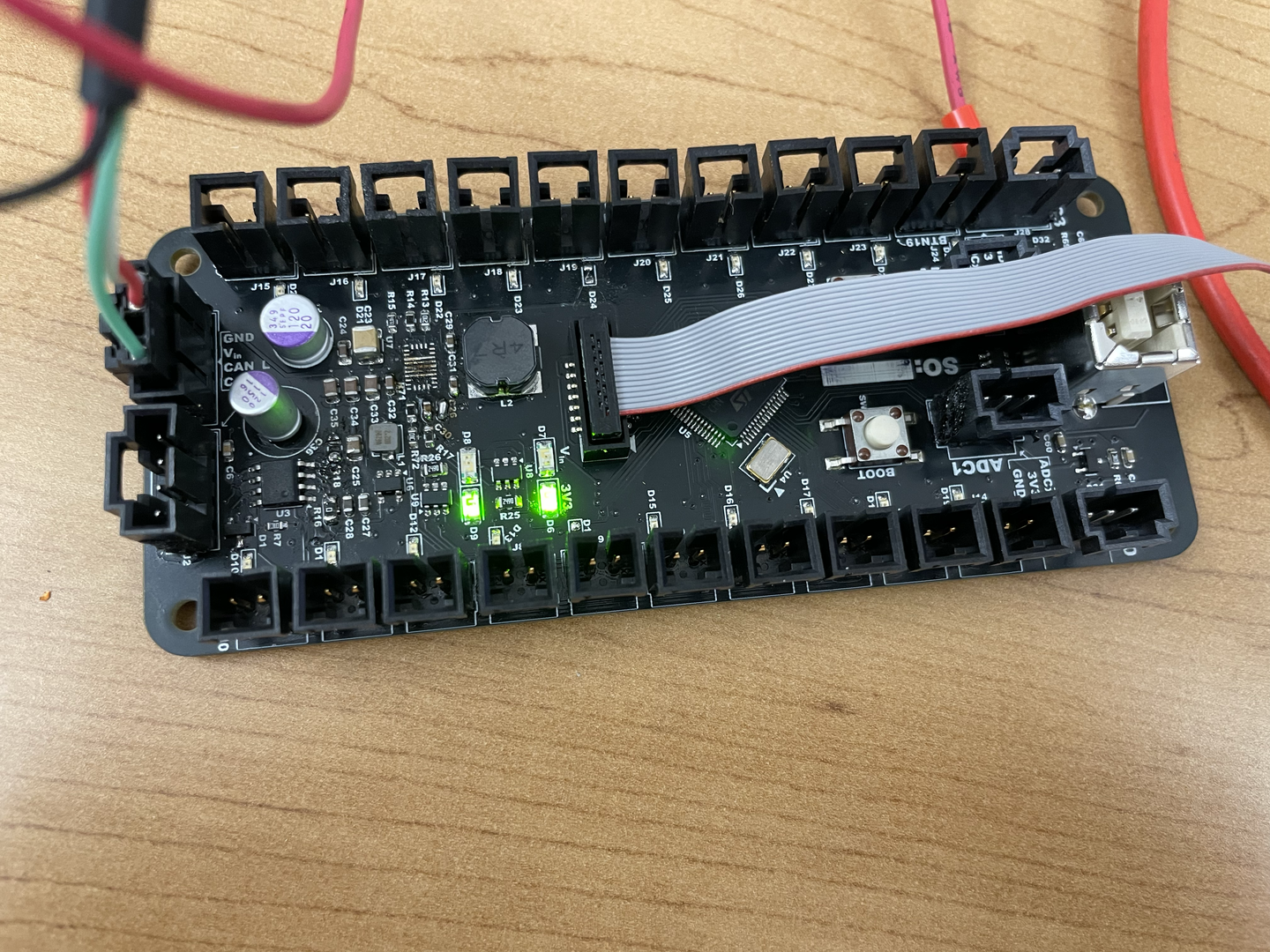
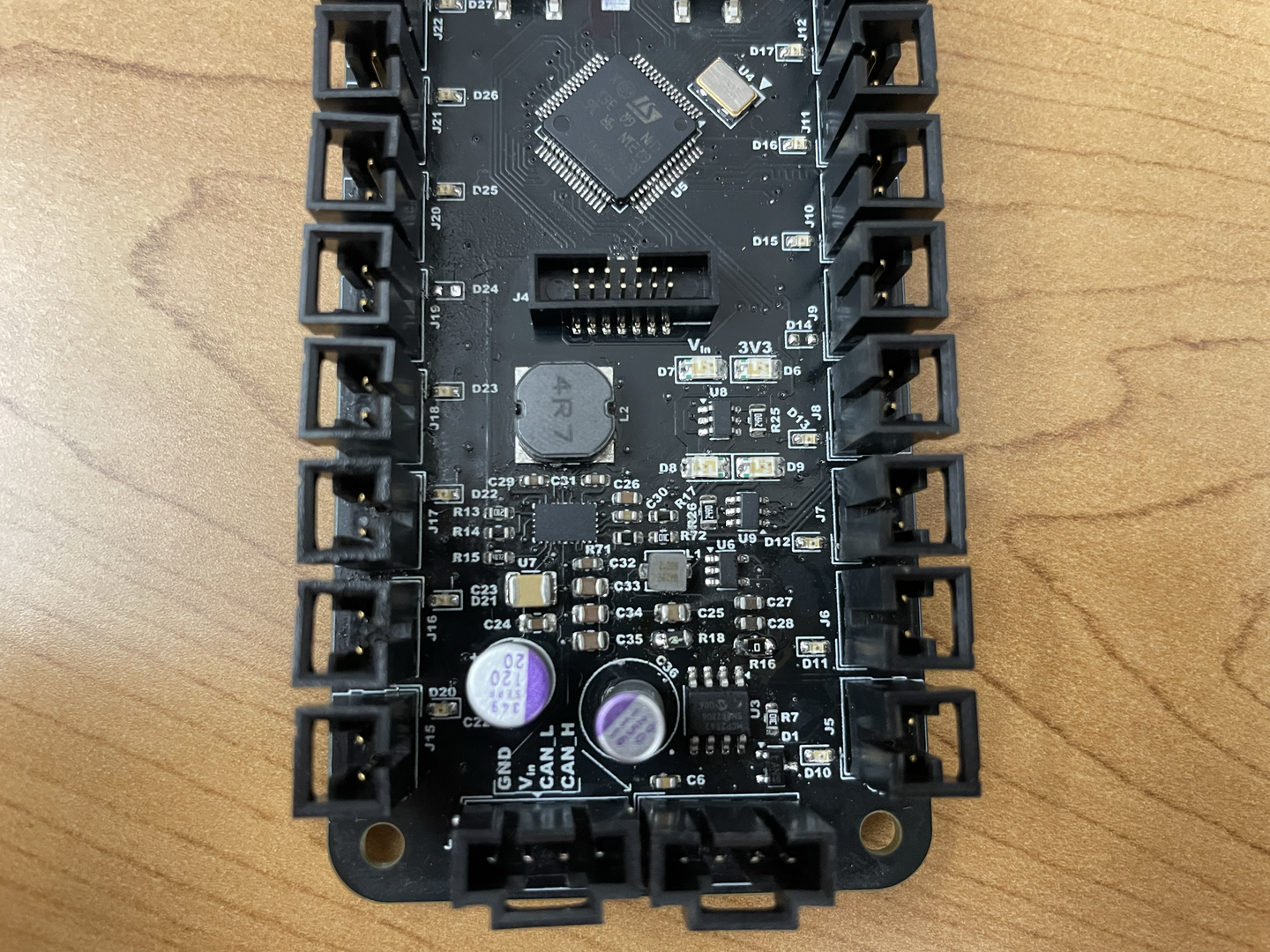
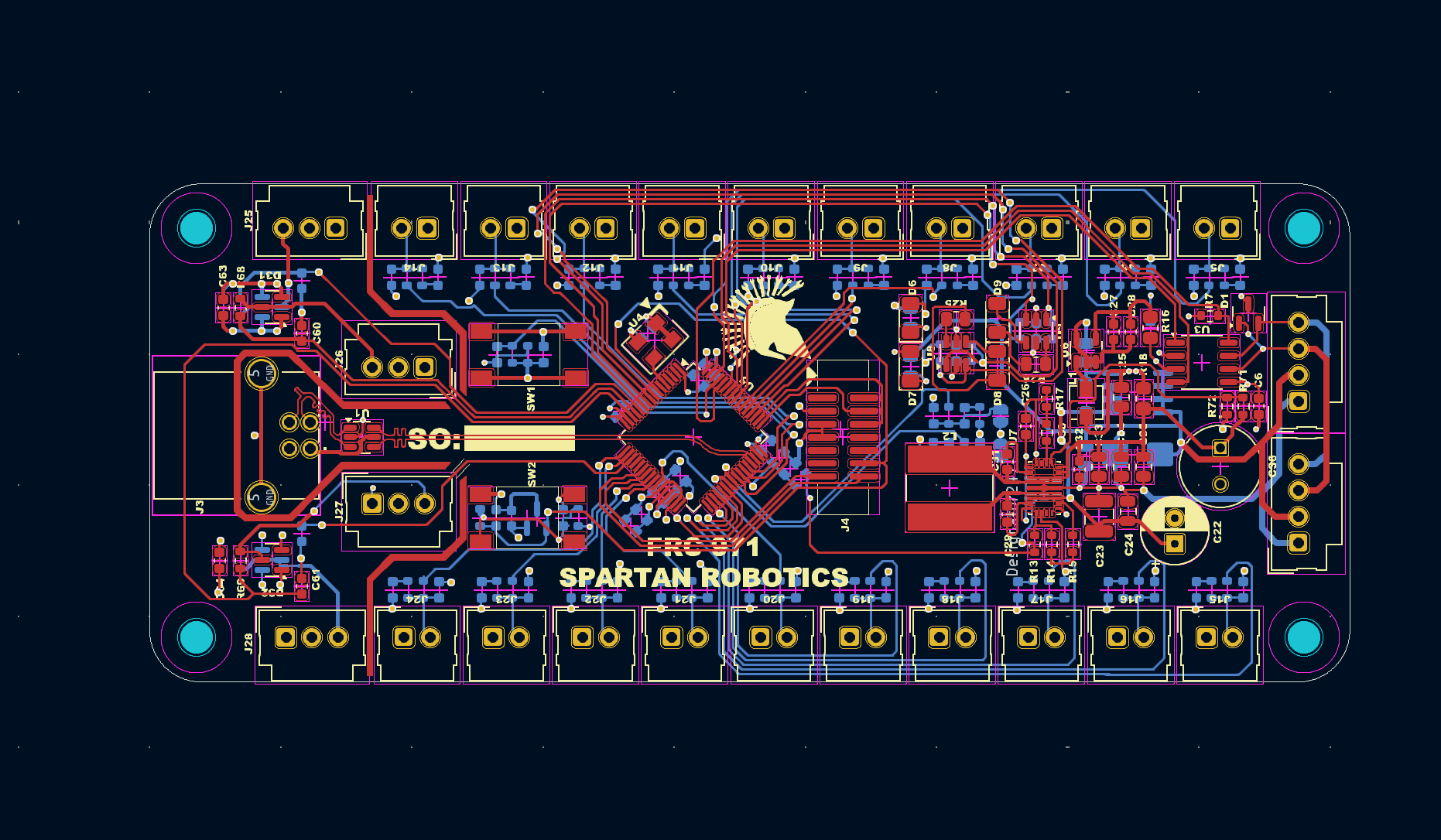
When our previous setup kept breaking and started losing us matches, I designed a custom STM32-based joystick and button controller that communicates over CAN FD. It has redundant USB connections that feed into two separate CAN channels for failover protection. Each board supports up to 20 buttons and 4 joysticks, with extremely fast data transfer and virtually zero latency.
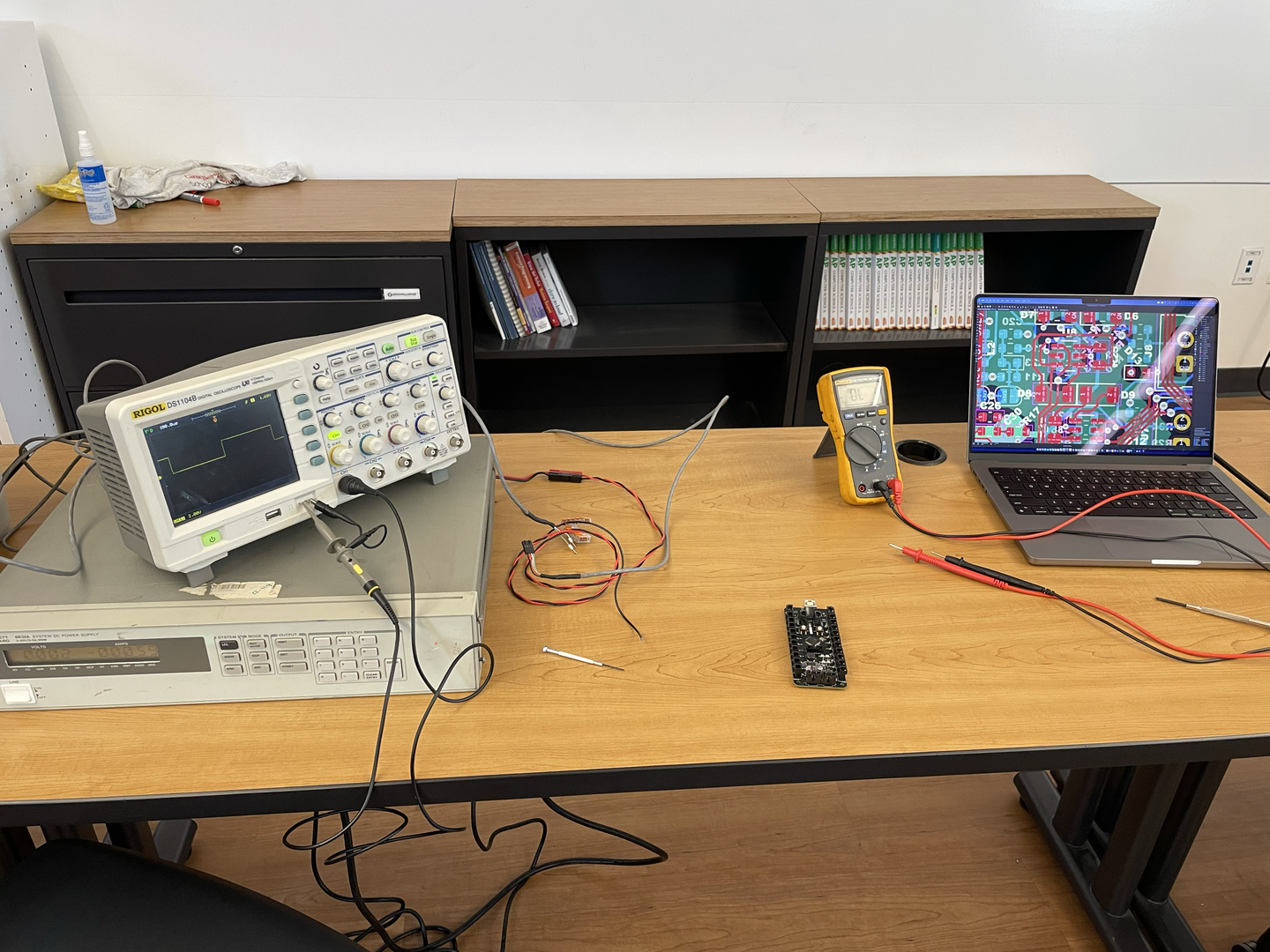
I also built a custom buck-boost power supply to dummy-proof the whole thing, protecting it from voltage issues and user errors. On top of that, the boards can talk to each other seamlessly, which gives us extra flexibility and redundancy in how the driver station is set up. It's still in development — software's in progress, hardware's being debugged — but it's already insanely responsive and ridiculously powerful.
Project Info