Hour of Robotics (YC Robohacks 2nd Place Winner)
A browser-based platform that lets anyone program real robots through a drag-and-drop interface, making robotics as accessible as Hour of Code made programming.
Project Details
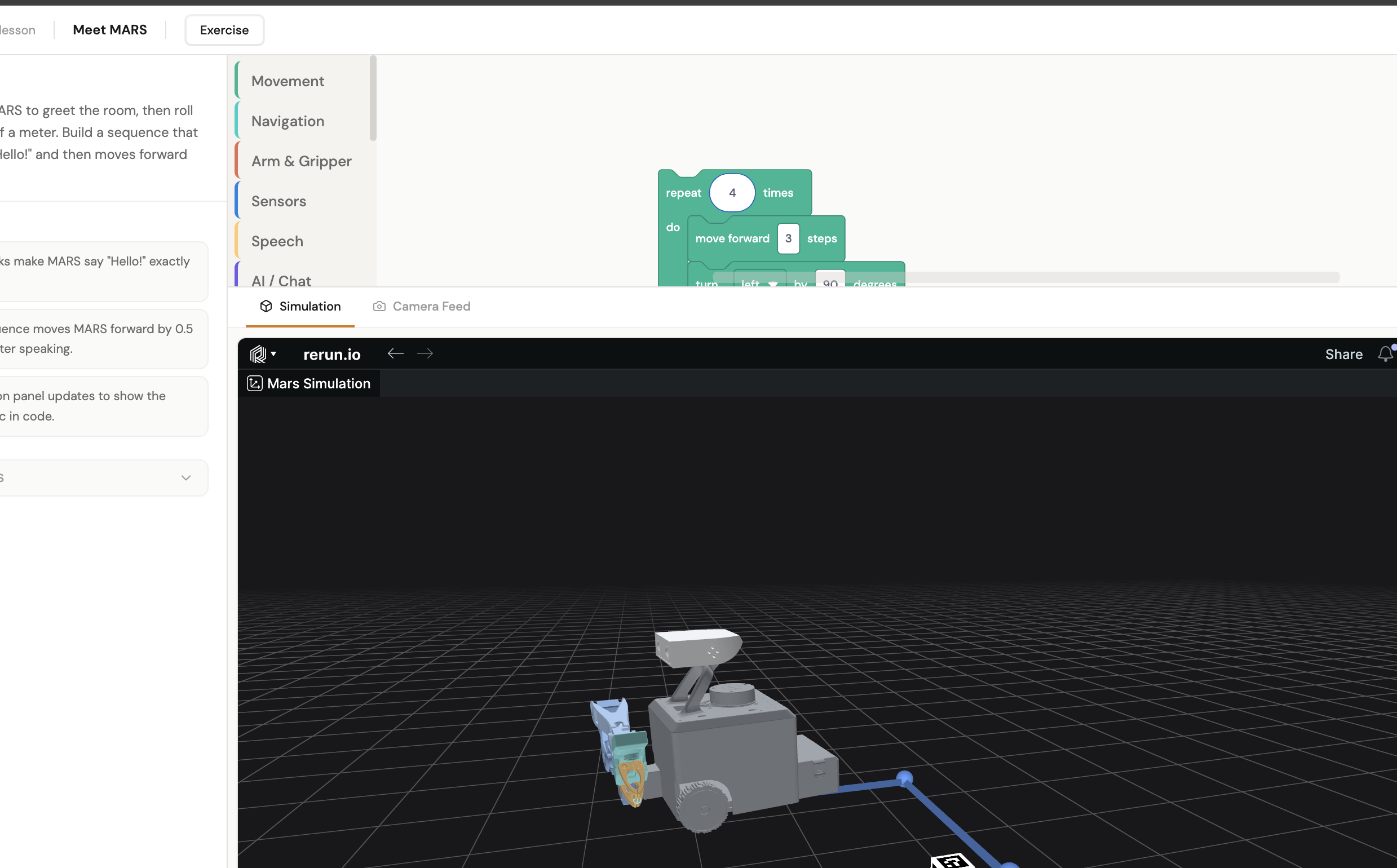
Hour of Code reached hundreds of millions of people and changed who gets into programming. We think robotics needs that same inflection point, because right now the barrier to entry is just way too high. So we built Hour of Robotics, a platform that lets anyone program real robots through a drag-and-drop interface like Scratch, running entirely in the browser.
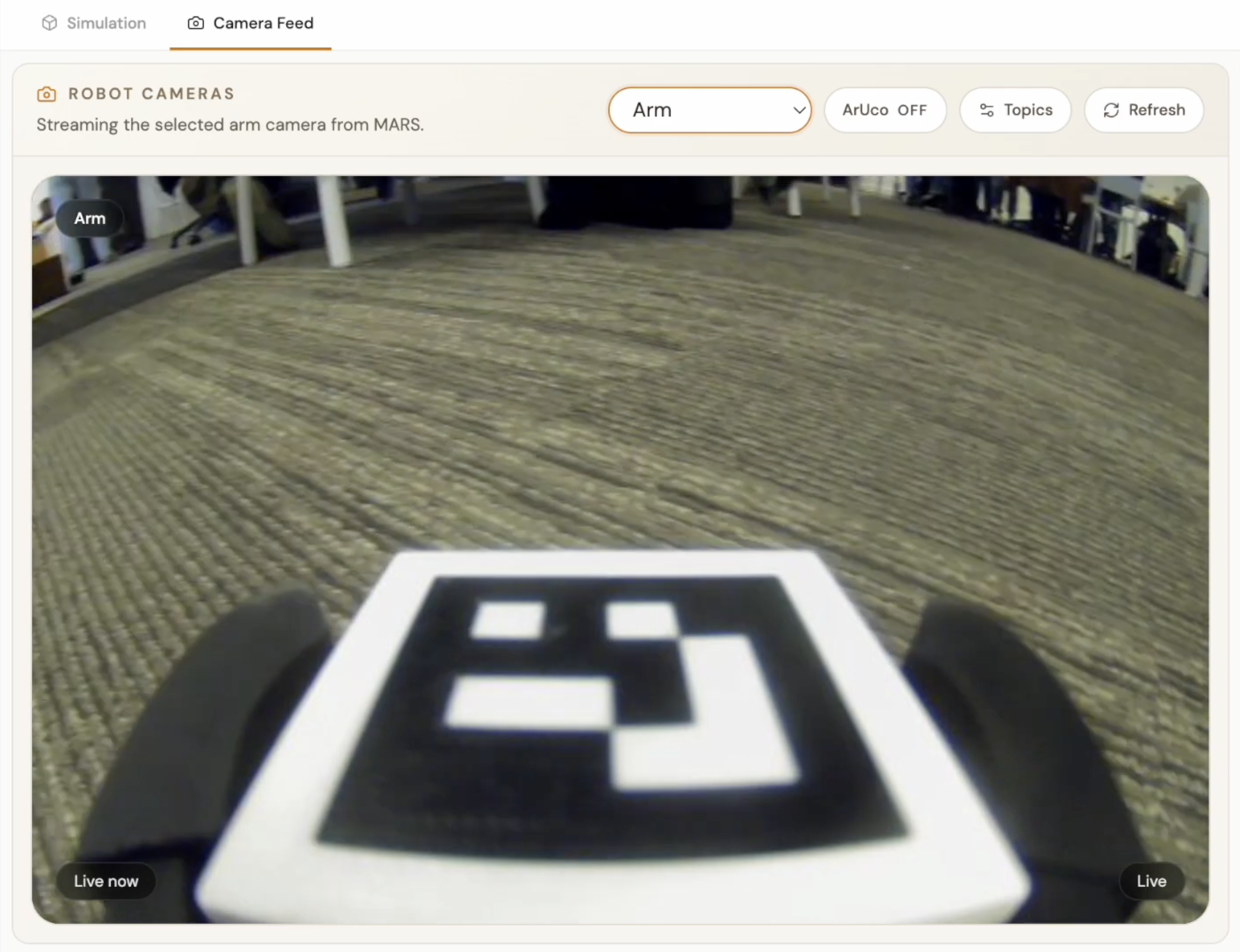
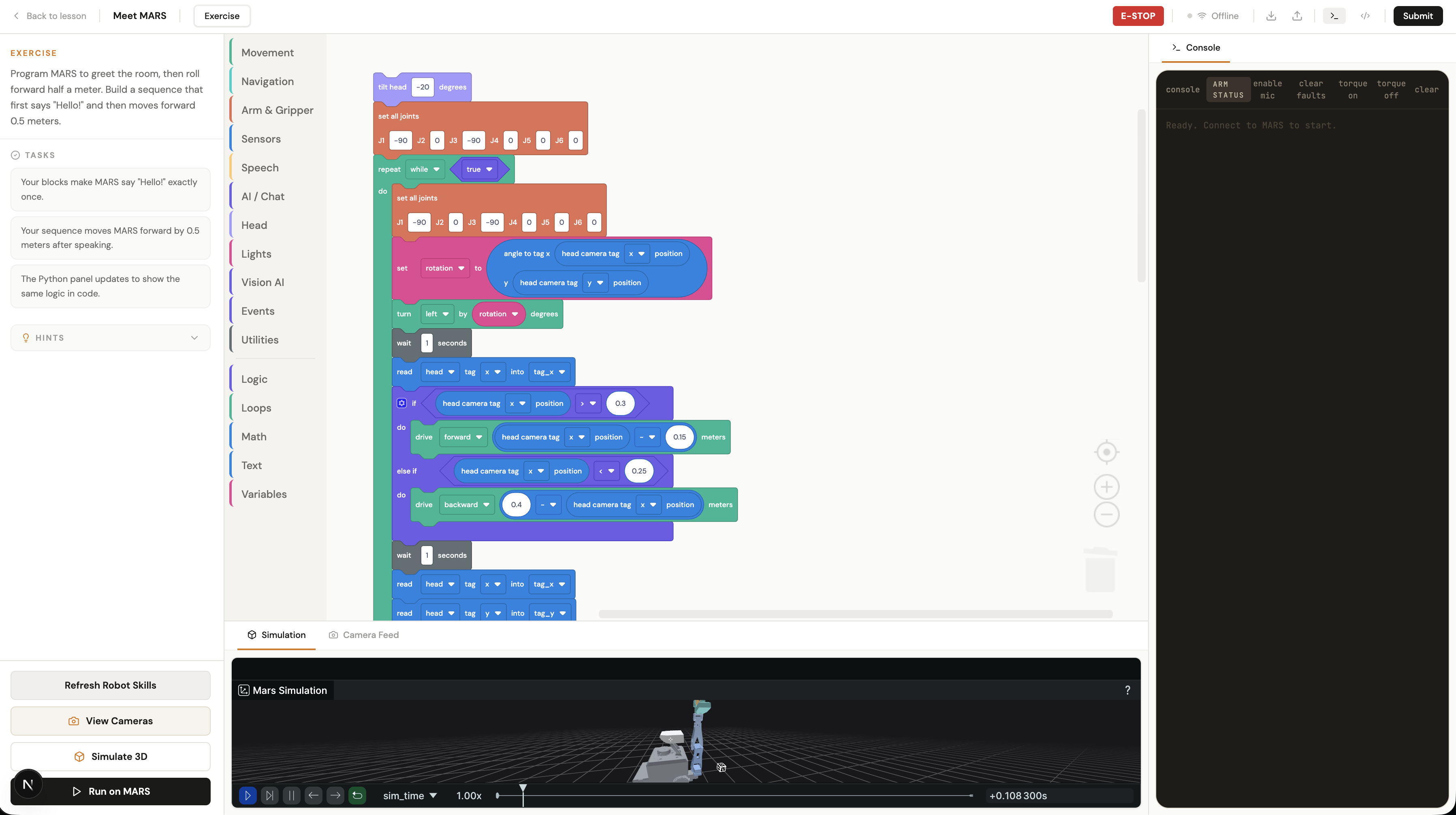
The Innate MARS robot has LiDAR, dual cameras, a drive base, and a 6-DOF arm. Instead of throwing people into complex ROS terminals, we turned everything into visual blocks: movement, arm control, navigation, vision, and speech, all backed by real ROS commands over WebSocket.
With the platform you can build full pick-and-place manipulation pipelines visually (most teams couldn't get consistent pickups, we were doing it reliably with ~20 blocks), test everything in a full in-browser simulator with IK, collision detection, and 3D visualization before touching hardware, use open vocabulary vision to find objects like a "red cup" by description, and run local LLM (Gemma 4) blocks for on-device reasoning with no API costs.
We took concepts like inverse kinematics, SLAM, and computer vision, and made them feel simple. That's the goal.
Project Info