6-DOF Robot Arm
Custom-built 6-degree-of-freedom robot arm with inverse kinematics, path planning, and camera-based control.
Project Details
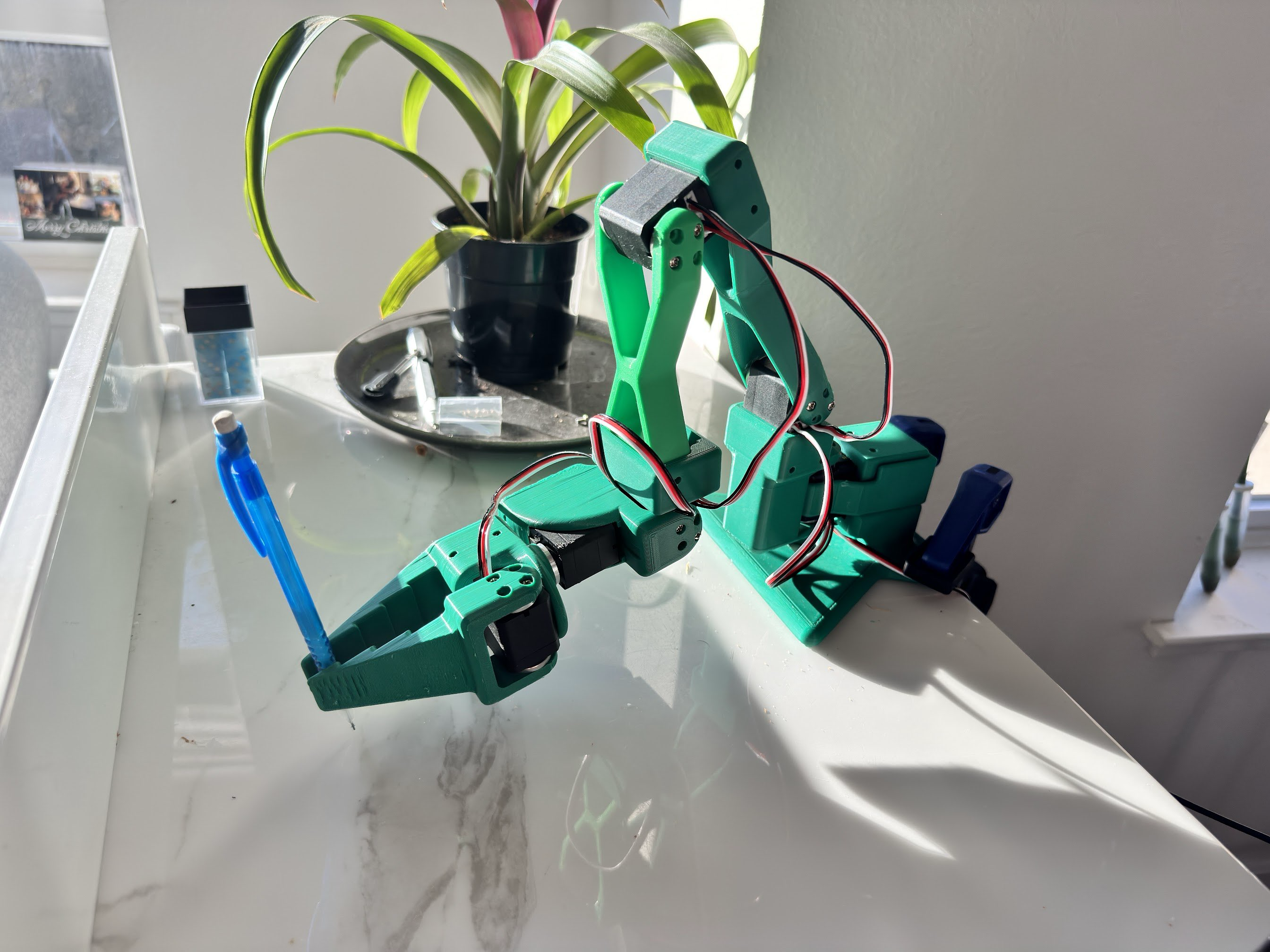
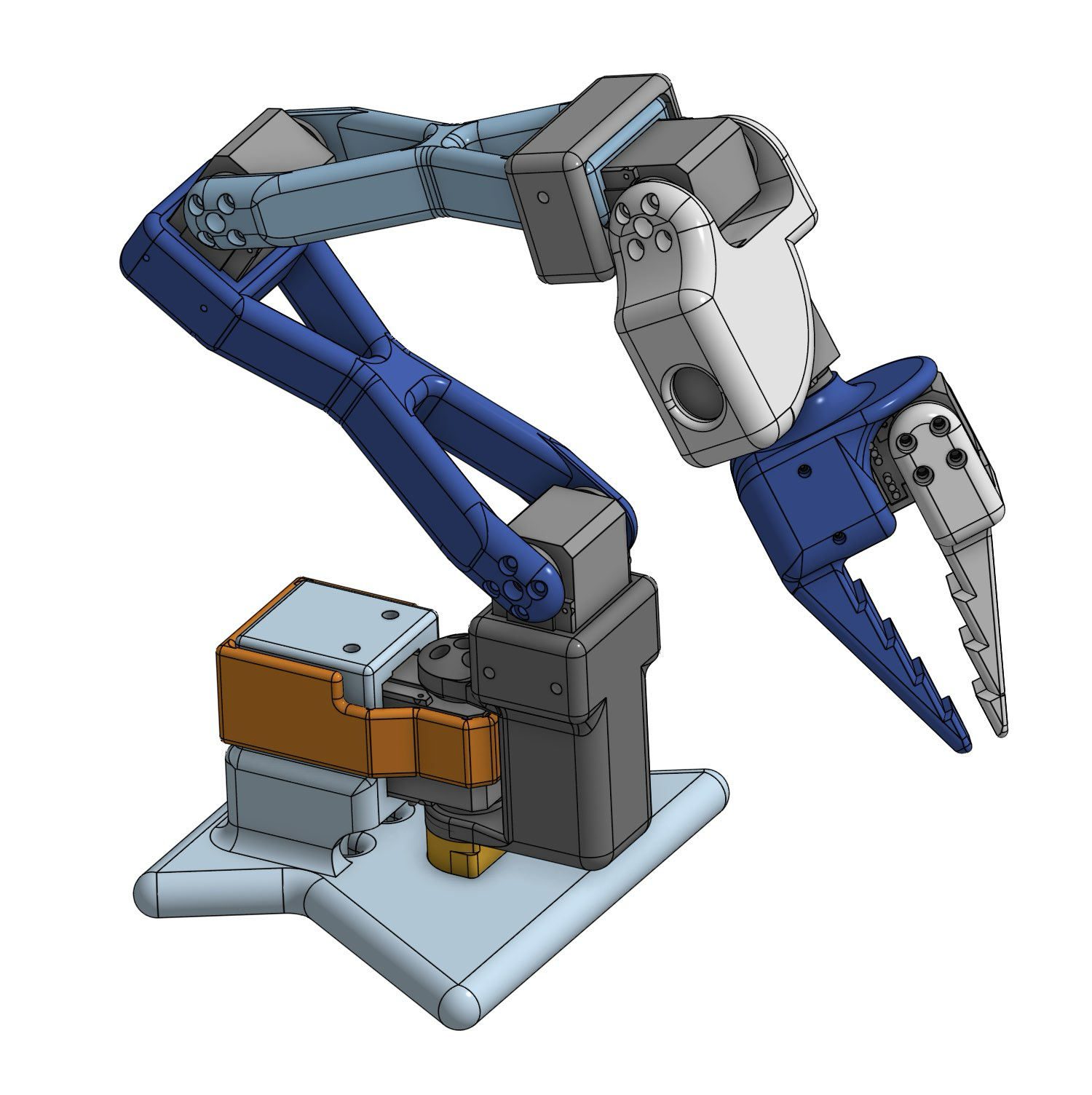
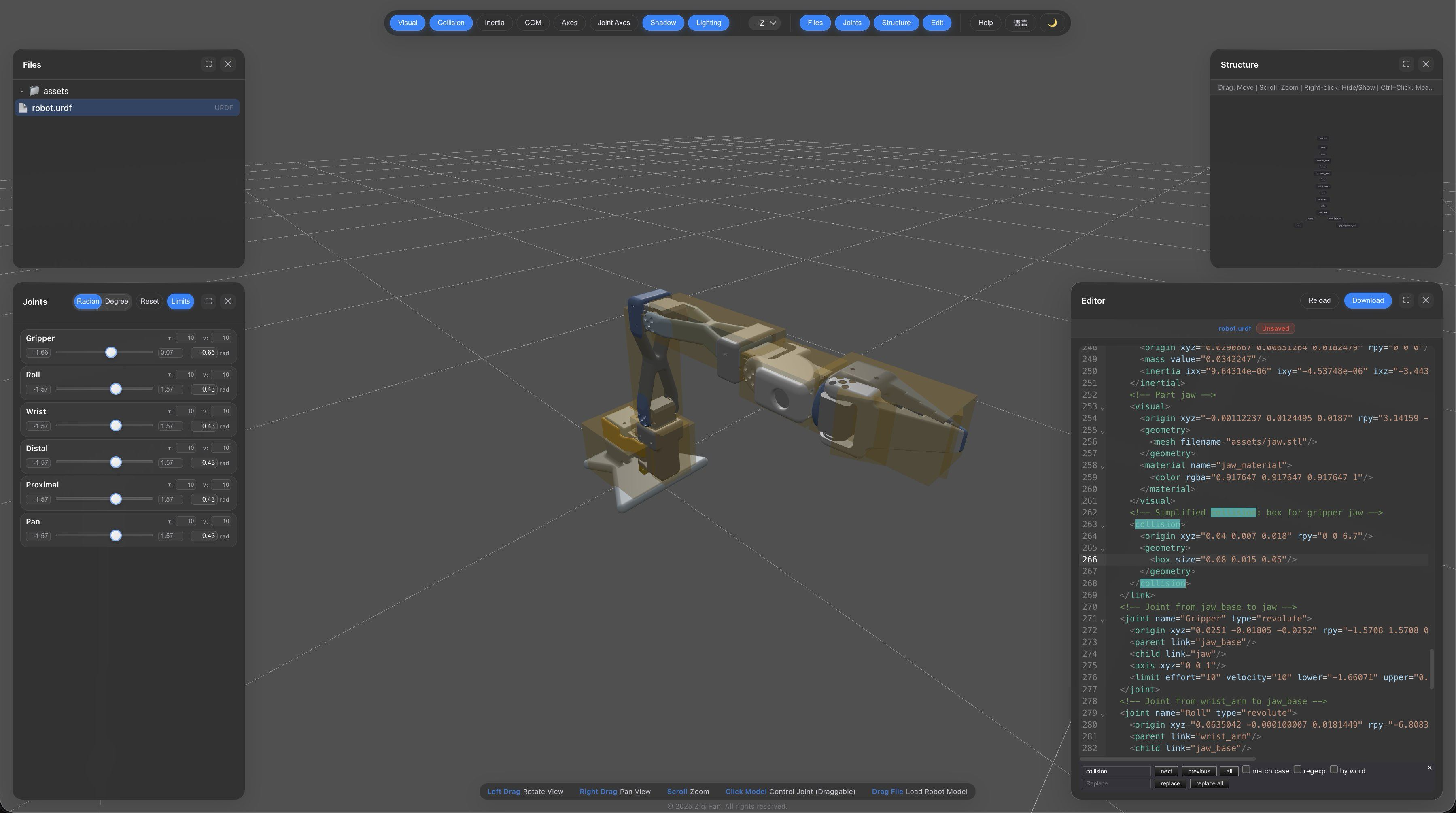
This is a current work-in-progress project. I'm experimenting with a lot of different ideas, but the first step was just building a robot to build on. I designed the arm in Onshape, then decided I wanted to write all of my own inverse kinematics from scratch instead of relying on black-box tooling.
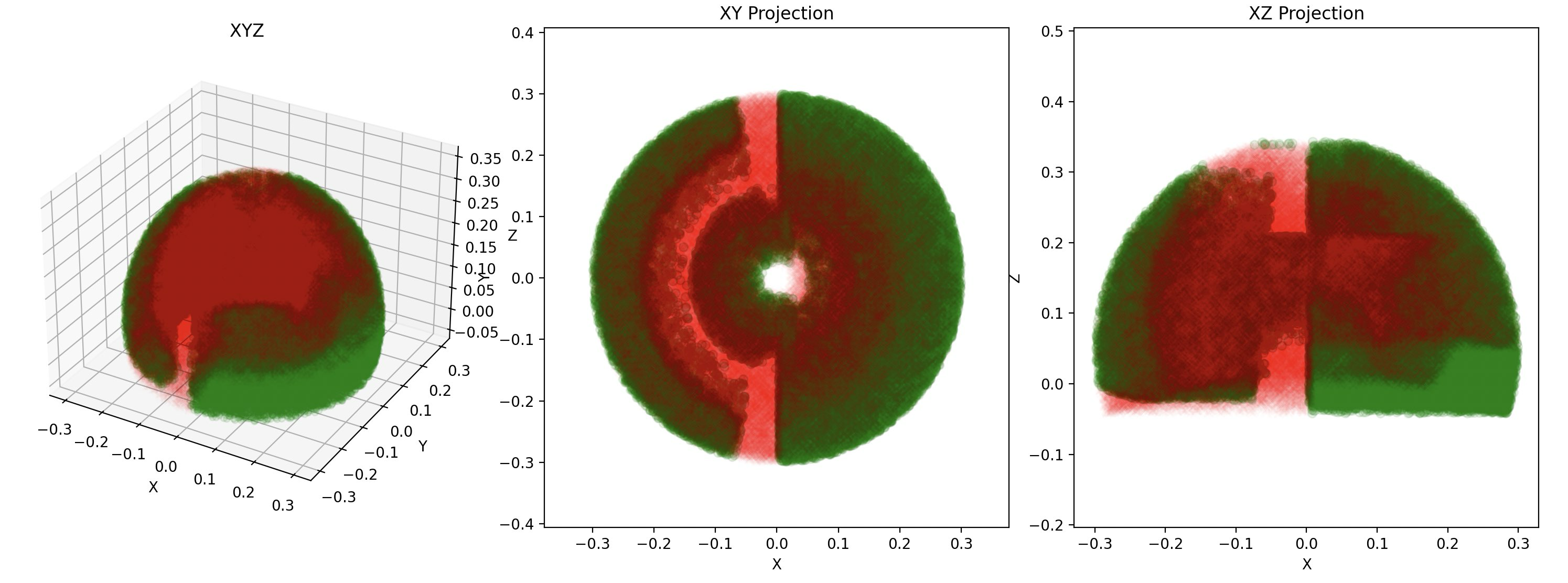
I've been using the Placo library and messing around with different path-planning approaches to find valid, non-self-intersecting motions, basically making sure the robot doesn't hurt itself or smash into its own body. I've tried a mix of PRM, RRT, linear interpolation, and joint-space planning, and I'm still comparing how each one behaves in practice.
On top of that, I'm exploring different control ideas using cameras, depth cameras, and wrist-mounted IMUs to make arm control more intuitive and to collect better data from human motion. All of this is very much a work in progress, and I'll keep updating this page as things evolve.
I've been working on this for a bit now and I've learned a ton about robotic control. It's been a genuinely fun project, especially the part where you finally plug it in and it immediately tomahawks across the desk, smashes your computer, and breaks something. That part's definitely my favorite.
P.S The videos are the coolest part!
Project Info